



ការបោះត្រា/ជង់មនុស្សយន្ត SDCX RMD-300/200/160/120/35/08/110/20/50
ប៉ារ៉ាម៉ែត្របច្ចេកទេស
| លេខម៉ូដែល | កម្រិតនៃសេរីភាព | របៀបបើកបរ | បន្ទុក (KG) | ភាពត្រឹមត្រូវនៃទីតាំងដដែលៗ (មម) | ជួរនៃចលនា (°) | ល្បឿនអតិបរមា (°/s) | បន្ទុកដែលអាចអនុញ្ញាតបាននៃកដៃ (kg·m2) | ការវាយជារង្វង់ (វដ្ត / ម៉ោង) | កាំនៃចលនា (មម) | ទំងន់ក្នុងស្រុក (គីឡូក្រាម) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | AC servo drive | ៣០០ | ± 0.5 | ± 180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | ១០០ | ១៩០ | ១៣៤ | ១០០០③ | ៣១៥០ | ១៥០០ |
| SDCX-RMD200 | 4 | AC servo drive | ២០០ | ±0.3 | ± 180 | ± +100~-44 | ± +121~-15 | ±360 | ១០៥ | ១០៧ | ១១៤ | ២៤២ | 78 | ១៣០០③ | ៣១៥០ | ១៥០០ |
| SDCX-RMD160 | 4 | AC servo drive | ១៦០ | ±0.3 | ± 180 | ± +100~-44 | ± +121~-15 | ±360 | ១២៣ | ១២៣ | ១២៨ | ៣០០ | 78 | ១៥០០③ | ៣១៥០ | ១៥០០ |
| SDCX-RMD120 | 4 | AC servo drive | ១២០ | ±0.3 | ± 180 | ± +100~-44 | ± +121~-15 | ±360 | ១២៨ | ១២៦ | ១៣៥ | ៣០០ | 78 | ១៥៦០③ | ៣១៥០ | ១៥០០ |
| SDCX-RMD50 | 4 | AC servo drive | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | ១៧១ | ១៧១ | ១៧១ | ២២២ | ៤.៥ | ១៧០០② | ២០៤០ | ៦៦០ |
| SDCX-RMD20 | 4 | AC servo drive | 20 | ± 0.08 | ± 1170 | ± +115~-25 | ± +70~-90 | ±360 | ១៧០ | ១៧០ | ១៨៥ | ៣៣០ | ០.៥១ | ១៧៨០① | ១៧២០ | ២៥៦ |
| SDCX-RMD08 | 4 | AC servo drive | 8 | ± 0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | ២៥១ | ១៩៥ | ១៩៥ | ៣៦៧.៥ | 0.25 | 1800① | ១៤៣៣ | ១៨០ |
កំណត់សម្គាល់៖
① ផ្លូវសាកល្បងមានកំពស់ 150mm និងទទឹង 1000mm ហើយពេលវេលាវដ្តពិតប្រាកដត្រូវបានប៉ះពាល់ដោយលក្ខខណ្ឌការងារជាក់ស្តែង។
② ផ្លូវសាកល្បងមានកំពស់ 200mm និងទទឹង 1000mm ហើយពេលវេលាវដ្តពិតប្រាកដត្រូវបានប៉ះពាល់ដោយលក្ខខណ្ឌការងារជាក់ស្តែង។
③ ផ្លូវសាកល្បងមានកំពស់ 400mm និងទទឹង 2000mm ហើយពេលវេលាវដ្តពិតប្រាកដត្រូវបានប៉ះពាល់ដោយលក្ខខណ្ឌការងារជាក់ស្តែង។
ជៀសវាងការប៉ះពាល់ជាមួយឧស្ម័ន និងវត្ថុរាវដែលងាយឆេះ ផ្ទុះ និងច្រេះ; ធ្វើដើម្បីកុំឱ្យប្រឡាក់ដោយទឹក ប្រេង និងធូលី។ រក្សាឱ្យឆ្ងាយពីប្រភពសំលេងរំខានអគ្គិសនី (ប្លាស្មា)
ជួរនៃចលនា
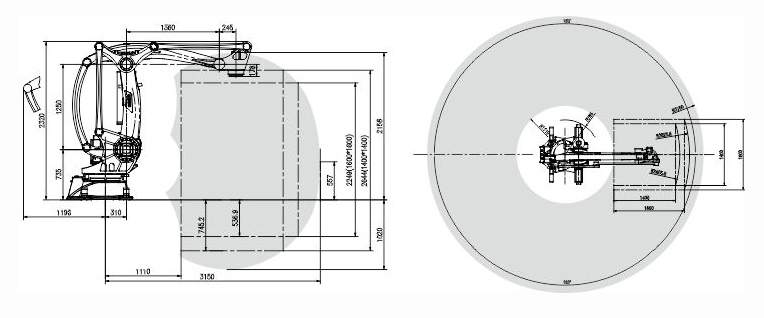
គ្រោងនៃជួរចលនាសម្រាប់ SDCX-RMD300/200/160/120
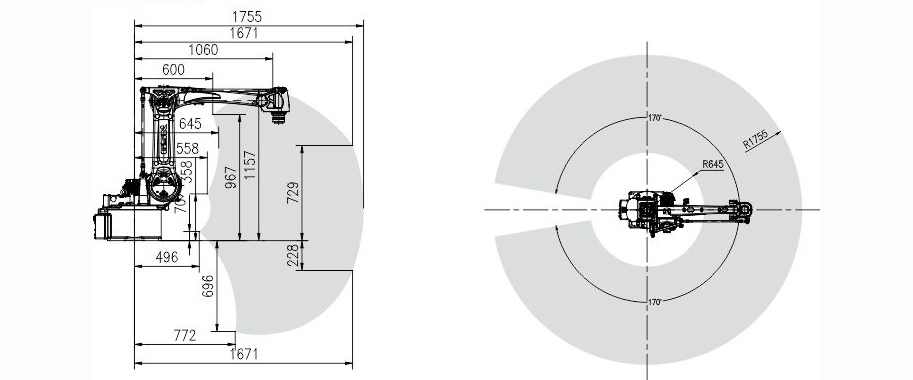
ផែនការនៃជួរចលនាសម្រាប់ SDCX-RMD20
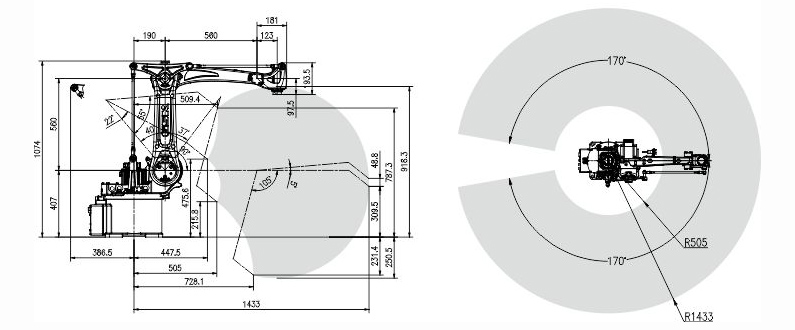
ផែនការនៃជួរចលនាសម្រាប់ SDCX-RMD08
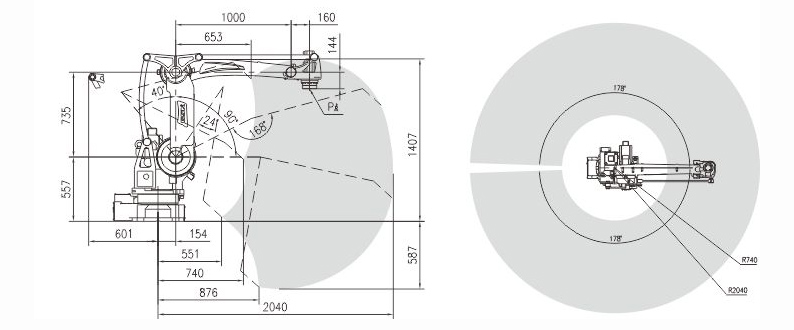
ផែនការនៃជួរចលនាសម្រាប់ SDCX-RMD50
ការបង្ហាញកម្មវិធីផលិតផល
ដំណោះស្រាយ
គ្រោងការណ៍បច្ចេកទេសនៃគម្រោងគ្រប់គ្រងខ្សែដែក












