




ប្រភេទ C/L/U ប្រភេទ Dual Axis Servo Positioner
ប៉ារ៉ាម៉ែត្របច្ចេកទេស
| ទីតាំង servo អ័ក្សទ្វេប្រភេទ C | ទីតាំង servo អ័ក្សទ្វេប្រភេទ L | ទីតាំង servo អ័ក្សពីរប្រភេទ U | |||||||||||
| លេខស៊េរី | គម្រោង | ប៉ារ៉ាម៉ែត្រ | ប៉ារ៉ាម៉ែត្រ | ប៉ារ៉ាម៉ែត្រ | ចំណាំ | ប៉ារ៉ាម៉ែត្រ | ប៉ារ៉ាម៉ែត្រ | ប៉ារ៉ាម៉ែត្រ | ចំណាំ | ប៉ារ៉ាម៉ែត្រ | ប៉ារ៉ាម៉ែត្រ | ប៉ារ៉ាម៉ែត្រ | ចំណាំ |
| 1 | បន្ទុកដែលបានវាយតម្លៃ | 200 គីឡូក្រាម |
500 គីឡូក្រាម | 1000 គីឡូក្រាម | ក្នុងរង្វង់ R400mm/R400mm/R600mm នៃអ័ក្សទីពីរ | 500 គីឡូក្រាម | 1000 គីឡូក្រាម | ២០០០ គីឡូក្រាម | ក្នុងរង្វង់ R400mm/R600mm/R800mm នៃអ័ក្សទីពីរ | 1000 គីឡូក្រាម | 3000KG | 5000KG | ក្នុងរង្វង់ R600mm/R1500mm/R2000mm នៃអ័ក្សទីពីរ |
| 2 | កាំស្តង់ដារនៃ gyration | R400 ម។ | R400 ម។ | R600 ម។ |
| R400 ម។ | R600 ម។ | R800 ម។ |
| R600 ម។ | R1500 ម។ | R2000 ម។ |
|
| 3 | មុំបង្វិលអ័ក្សទីមួយ | ± 180° | ± 180° | ± 180° |
| ± 180° | ± 180° | ± 180° |
| ± 180° | ± 180° | ± 180° |
|
| 4 | មុំបង្វិលអ័ក្សទីពីរ | ± 360° | ± 360° | ± 360° |
| ± 360° | ± 360° | ± 360° |
| ± 360° | ± 360° | ± 360° |
|
| 5 | បានវាយតម្លៃល្បឿនឡើងលើនៃអ័ក្សទីមួយ | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | បានវាយតម្លៃល្បឿនបង្វិលនៃអ័ក្សទីពីរ | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | ធ្វើម្តងទៀតនូវភាពត្រឹមត្រូវនៃទីតាំង | ± 0.10 ម។ | ± 0.15 ម។ | ± 0.20 ម។ |
| ± 0.10 ម។ | ± 0.10 ម។ | 17°/S |
| ± 0.15 ម។ | ± 0.20 ម។ | ± 0.25 ម។ |
|
| 8 | វិមាត្រព្រំដែននៃស៊ុមផ្លាស់ទីលំនៅ (ប្រវែង×ទទឹង×កម្ពស់) | 1200mm × 600mm × 70mm | 1600mm × 800mm × 90mm | 2000mm × 1200mm × 90mm |
| - | - | - |
| - | - | - |
|
| 9 | វិមាត្ររួមនៃការផ្លាស់ប្តូរទីតាំង (ប្រវែង×ទទឹង×កម្ពស់) | 2000mm × 1100mm × 1700mm | 2300mm × 1200mm × 1900mm | 2700mm × 1500mm × 2200mm |
| 1500mm × 500mm × 850mm | 2000mm × 750mm × 1200mm | 2400mm × 900mm × 1600mm |
| 4200mm × 700mm × 1800mm | 5500mm × 900mm × 2200mm | 6500mm × 1200mm × 2600mm |
|
| 10 | បន្ទះបង្វិលអ័ក្សពីរស្តង់ដារ | - | - | - | - | Φ800 ម។ | Φ 1200 ម។ | Φ 1500 ម។ |
| Φ 1500 ម។ | Φ 1800 ម។ | Φ 2000 ម។ |
|
| 11 | កម្ពស់កណ្តាលនៃការបង្វិលអ័ក្សទីមួយ
| 1200 ម។ | ១៣៥០ ម។ | ១៦០០ ម។ |
| 550 ម។ | ៨០០ ម។ | 1000 ម។ |
| 1500 ម។ | ១៧៥០ ម។ | 2200 ម។ |
|
| 12 | លក្ខខណ្ឌផ្គត់ផ្គង់ថាមពល | បីដំណាក់កាល 200V ± 10% 50HZ | បីដំណាក់កាល 200V ± 10% 50HZ | បីដំណាក់កាល 200V ± 10% 50HZ | ជាមួយឧបករណ៍បំលែងឯកោ | បីដំណាក់កាល 200V ± 10% 50HZ | បីដំណាក់កាល 200V ± 10% 50HZ | បីដំណាក់កាល 200V ± 10% 50HZ | ជាមួយឧបករណ៍បំលែងឯកោ | បីដំណាក់កាល 200V ± 10% 50HZ | បីដំណាក់កាល 200V ± 10% 50HZ | បីដំណាក់កាល 200V ± 10% 50HZ | ជាមួយឧបករណ៍បំលែងឯកោ |
| 13 | ថ្នាក់អ៊ីសូឡង់ | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | ទំងន់សុទ្ធនៃឧបករណ៍ | ប្រហែល ៨០០ គីឡូក្រាម | ប្រហែល 1300 គីឡូក្រាម | ប្រហែល 2000 គីឡូក្រាម |
| ប្រហែល ៩០០ គីឡូក្រាម | ប្រហែល ១៦០០ គីឡូក្រាម | ប្រហែល 2500 គីឡូក្រាម |
| ប្រហែល 2200 គីឡូក្រាម | ប្រហែល 4000 គីឡូក្រាម | ប្រហែល 6000 គីឡូក្រាម | |
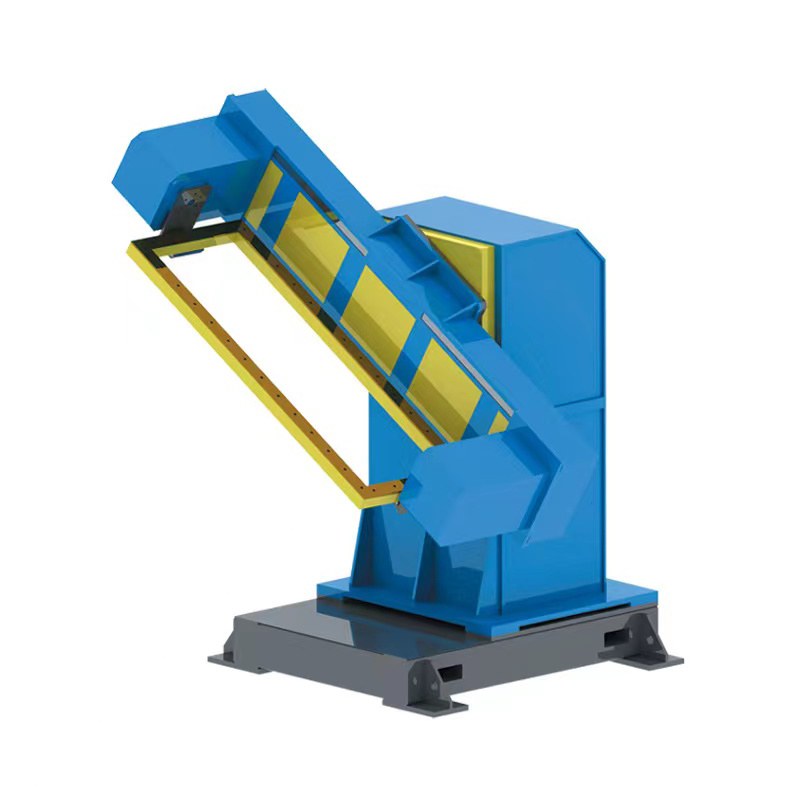
ទីតាំង servo អ័ក្សទ្វេប្រភេទ C
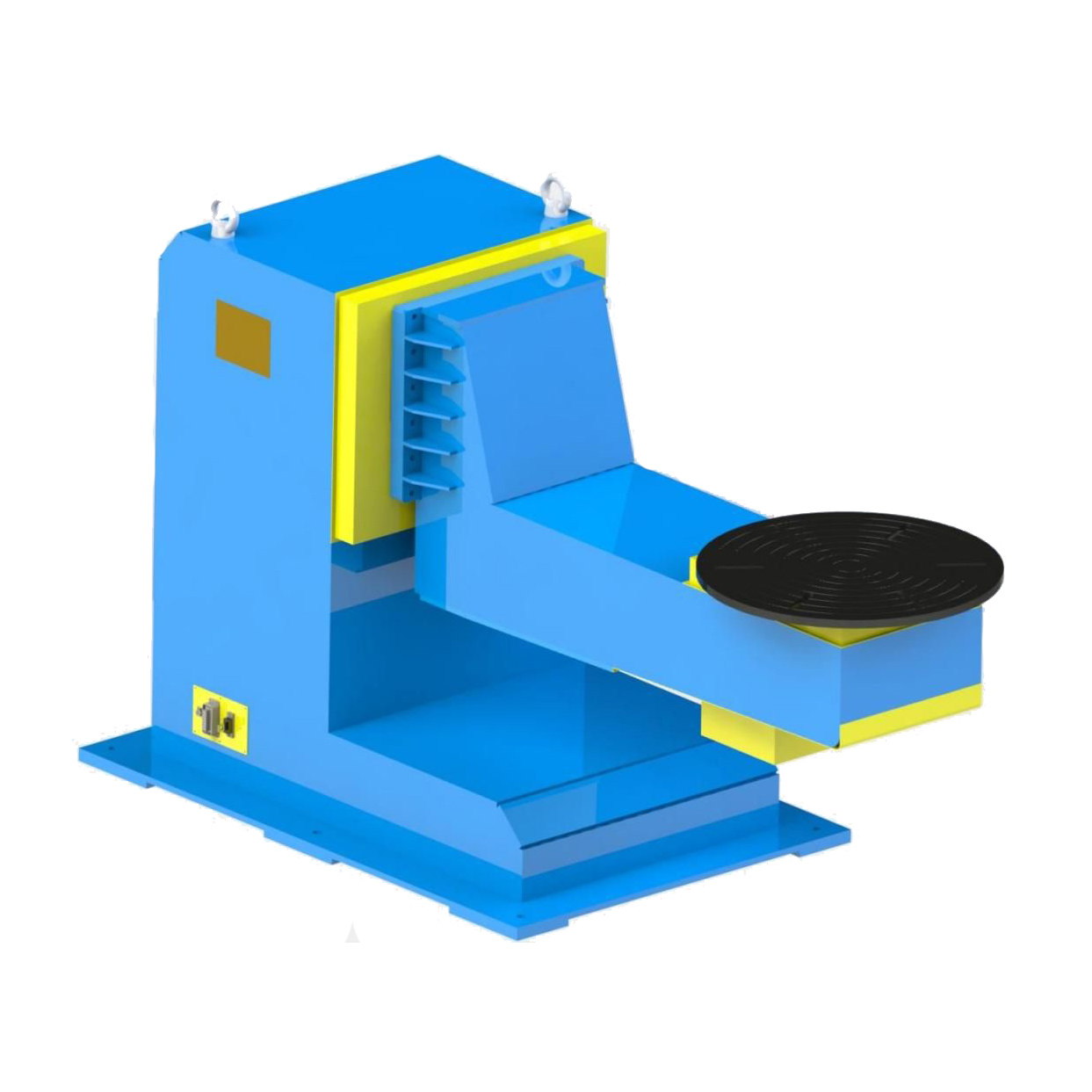
ទីតាំង servo អ័ក្សទ្វេប្រភេទ L

ទីតាំង servo អ័ក្សពីរប្រភេទ U
ការណែនាំអំពីរចនាសម្ព័ន្ធ
ទីតាំង servo អ័ក្សពីរត្រូវបានផ្សំឡើងជាចម្បងនៃស៊ុមអាំងតេក្រាល welded, welded displacement frame, AC servo motor and RV precision reducer, rotary support, conductive mechanism, protective Shield និងប្រព័ន្ធគ្រប់គ្រងអគ្គិសនី។ ស៊ុមអាំងតេក្រាល welded ត្រូវបាន welded ជាមួយទម្រង់ដែលមានគុណភាពខ្ពស់។ បន្ទាប់ពីការសម្រាល និងបន្ធូរភាពតានតឹង វាត្រូវបានដំណើរការដោយម៉ាស៊ីនដែលមានជំនាញវិជ្ជាជីវៈ ដើម្បីធានាបាននូវភាពត្រឹមត្រូវខ្ពស់ និងភាពត្រឹមត្រូវនៃមុខតំណែងសំខាន់ៗ។ ផ្ទៃត្រូវបានបាញ់ដោយថ្នាំលាបរូបរាងប្រឆាំងនឹងច្រែះដែលមានភាពស្រស់ស្អាតនិងសប្បុរសហើយពណ៌អាចត្រូវបានប្ដូរតាមតម្រូវការរបស់អតិថិជន។
ស៊ុមផ្លាស់ទីលំនៅ welded នឹងត្រូវបាន welded និង molded ជាមួយដែកទម្រង់ដែលមានគុណភាពខ្ពស់និងដំណើរការដោយម៉ាស៊ីនដែលមានជំនាញវិជ្ជាជីវៈ។ ផ្ទៃត្រូវតែត្រូវបានម៉ាស៊ីនជាមួយនឹងរន្ធវីសស្តង់ដារសម្រាប់ដាក់ឧបករណ៍កំណត់ទីតាំង ហើយការលាបពណ៌ និងការធ្វើឱ្យខ្មៅ និងការការពារច្រែះត្រូវធ្វើឡើង។
វេទិកា rotary ជ្រើសរើសដែកថែបទម្រង់ដែលមានគុណភាពខ្ពស់បន្ទាប់ពីដំណើរការមេកានិចប្រកបដោយវិជ្ជាជីវៈ ហើយផ្ទៃខាងលើត្រូវបានម៉ាស៊ីនជាមួយនឹងរន្ធវីសស្តង់ដារសម្រាប់ដាក់ឧបករណ៍សម្រាប់ដាក់ទីតាំង ហើយការព្យាបាលការធ្វើឱ្យខ្មៅ និងការពារច្រែះនឹងត្រូវអនុវត្ត។
ការជ្រើសរើស AC servo motor និង RV reducer ជាយន្តការថាមពលអាចធានាបាននូវស្ថេរភាពនៃការបង្វិល ភាពត្រឹមត្រូវនៃទីតាំង ភាពធន់បានយូរ និងអត្រាបរាជ័យទាប។ យន្តការ conductive ត្រូវបានធ្វើពីលង្ហិនដែលមានប្រសិទ្ធិភាព conductive ល្អ។ មូលដ្ឋាន conductive ទទួលយកអ៊ីសូឡង់អាំងតេក្រាលដែលអាចការពារម៉ូទ័រ servo មនុស្សយន្ត និងប្រភពថាមពលនៃការផ្សារយ៉ាងមានប្រសិទ្ធភាព។
ប្រព័ន្ធគ្រប់គ្រងអគ្គិសនីប្រើប្រាស់ Japanese Omron PLC ដើម្បីគ្រប់គ្រងទីតាំងជាមួយនឹងដំណើរការមានស្ថេរភាព និងអត្រាបរាជ័យទាប។ គ្រឿងបន្លាស់អគ្គិសនីត្រូវបានជ្រើសរើសពីម៉ាកល្បីៗក្នុងប្រទេស និងក្រៅប្រទេស ដើម្បីធានាបាននូវគុណភាព និងស្ថេរភាពនៃការប្រើប្រាស់។











